Ang Hengjiang Intelligent Technology Co., Ltd. ay isang propesyonal na tagagawa at tagapagtustos ng mga sistema ng baking robot at kagamitan sa pag-aautomat ng industriya na grado ng pagkain. Ang aming portfolio ng produkto ay sumasaklaw sa mga standalone na robot ng Delta at SCARA, nababaluktot na mga robotic workstation, at mga full-line na sistema ng pag-aayos at pag-iimpake - lahat ay ininhinyero para sa mataas na bilis, mataas na katumpakan, malinis na operasyon sa modernong panaderya at frozen na mga kapaligiran sa produksyon ng pagkain. Kung naghahanap ka man ng isang solong-yunit na robot upang i-automate ang isang proseso ng node o isang kumpletong linya ng turnkey para sa donut, pizza, o produksyon ng itlog ng itlog, nagbibigay ang Hengjiang ng nasusukat, modular na mga solusyon na binabawasan ang mga gastos sa paggawa, alisin ang pagkakamali ng tao, at itaas ang throughput upang matugunan ang mga hinihingi ng mga pamantayan ng matalinong pabrika.
Tulad ng naranasanMga tagagawa ng Delta Robot, Hengjiang disenyo at gumagawa ng kanyang HJ-D11003-1 serye parallel manipulators mula sa lupa up, na sumasaklaw sa mekanikal na istraktura, paggalaw control firmware, at end-effector tooling. Ang isang delta robot ay nagpapatakbo sa isang parallel kinematic architecture: tatlong independiyenteng hinihimok na mga braso ay konektado sa isang nakapirming itaas na frame, at ang lahat ng magkasanib na actuators ay nananatili sa nakatigil na base sa halip na gumagalaw sa arm assembly. Pinapanatili nito ang gumagalaw na masa na napakababa, na siyang pangunahing dahilan kung bakit ang mga robot ng delta ay maaaring makamit ang mga rate ng pag-ikot at mga acceleration na hindi maaaring tumugma sa mga serial-arm robot.
Teknikal na arkitektura ng serye ng HJ-D11003-1: Ang tatlong itaas na braso ay hinihimok ng mga servo motor na naka-mount nang concentrically sa base plate. Ang carbon-fiber o aluminyo na mas mababang mga link ay nagpapadala ng paggalaw sa gitnang gumagalaw na platform sa pamamagitan ng mga kasukasuan ng bola-at-socket, na nag-aalis ng backlash. Ang karaniwang variant na hindi umiikot na axis ay humahawak ng purong XYZ pick-and-place, habang ang umiikot na variant ng axis ay nagdaragdag ng isang ikaapat na axis (R axis) sa end effector, na nagpapagana ng pagwawasto ng oryentasyon sa panahon ng pagpili - kritikal kapag ang mga produkto ay dumating sa mga random na anggulo sa infeed conveyor. Ang kapasidad ng payload ay nagta-target ng magaan na mga produkto (karaniwang sa ilalim ng 3 kg bawat yunit), na may mga diameter ng sobre na karaniwang nasa saklaw ng 800-1,100 mm at vertical stroke hanggang sa 300 mm.
Pagsasama ng kontrol at paningin: Ang bawat robot ay ipinares sa isang servo drive cabinet at isang dedikadong robot controller na nagpapatakbo ng software ng pagpaplano ng paggalaw ng Hengjiang. Ang paningin ng makina ay pinangangasiwaan ng isang pang-industriya na camera na naka-mount nang coaxially sa itaas ng conveyor belt. Ang vision system ay nag-stream ng posisyon ng produkto at data ng anggulo sa controller sa real time, na pagkatapos ay kinakalkula ang mga indibidwal na pagtatalaga ng pagpili ng robot sa loob ng multi-robot cluster. Ang protocol ng komunikasyon sa pagitan ng host ng pangitain at ng robot controller ay gumagamit ng standard na pang-industriya na Ethernet (EtherCAT o Modbus TCP), na nagpapahintulot sa pagsasama sa mga third-party na sistema ng SCADA nang walang karagdagang middleware.
Mga pagsasaalang-alang sa malinis na disenyo: Ang lahat ng mga ibabaw na nakalantad sa zone ng pagkain ay gumagamit ng 304 o 316 hindi kinakalawang na asero na mga fastener at ligtas na pagkain na polimer link na mga pabahay. Pinipigilan ng mga enclosure ng motor na na-rate ng IP65 ang pagpasok ng singaw at paghuhugas ng tubig. Ang pamamahala ng cable ay nag-aayos ng mga kable sa pamamagitan ng mga selyadong channel ng daluyan, na nag-aalis ng mga pahalang na ibabaw kung saan maaaring maipon ang mga labi.
Naaangkop na mga produkto: donut, dumplings, steamed buns, croissants, egg tarts, chocolate pieces, at iba pang nabuo o molded inihurnong o frozen na kalakal. Ang HJ-D11003-1 ay magagamit sa parehong mga di-umiikot at umiikot na mga pagsasaayos ng axis; Tingnan ang bawat pahina ng detalye ng modelo para sa eksaktong mga parameter ng kinematic, mga sobre ng Reach, at mga rating ng payload.
Para sa mga kumpanya na sumusuriMga tagagawa ng Delta Robotsa buong mundo, nag-aalok ang Hengjiang ng pagsubok sa pagtanggap ng pabrika (FAT), remote commissioning support, at kooperasyon ng OEM / ODM. Ang mga demonstrasyon ng video ng sanggunian ng mga robot ng delta sa live na donut at mga linya ng pag-aayos ng pizza ay magagamit saPagluluto ng Robot Video Library.
Pag-unawaPresyo ng SCARA robotMahalaga ang mga kadahilanan bago magsagawa ng isang proyekto sa automation. Ang mga robot ng SCARA ng Hengjiang (Selective Compliance Assembly Robot Arm) ay independiyenteng binuo at ginawa, na nangangahulugang ang pagpepresyo ay sumasalamin sa aktwal na halaga ng engineering sa halip na mga markup ng distributor. Kasama sa kasalukuyang lineup ang apat na modelo - HJ-SC1250-R, HJ-SC1050-R, HJ-SCD0625A, at HJ-SCD7840 - na naiiba sa pamamagitan ng pag-abot ng braso (625 mm hanggang 1,250 mm), payload (5 kg hanggang 30 kg), at Z-axis stroke.
Ano ang tumutukoy sa presyo ng robot ng SCARA? Limang pangunahing kadahilanan ang namamahala sa pangwakas na gastos ng isang sistema ng SCARA na grado ng pagkain:
Arm reach at payload class: Ang mas mahabang abot at mas mataas na payload ay nangangailangan ng mas mabibigat na bahagi ng istruktura at mas malaking servo drive, na direktang nagdaragdag ng gastos ng yunit. Ang HJ-SC1250-R, halimbawa, ay sumasaklaw sa isang 1,250 mm na maabot na may 30 kg na kapasidad ng payload, na angkop para sa paghawak ng pallet-layer, habang ang HJ-SCD0625A ay nagta-target ng katumpakan na pag-aayos sa isang 625 mm na maabot na may isang mas magaan na sobre ng payload at kaukulang mas mababang tier ng presyo.
Bilang ng axis: Ang mga karaniwang robot ng SCARA ay gumagana sa apat na axes (J1 pag-ikot, J2 pag-ikot, Z linear, R wrist rotation). Ang ilang mga pagsasaayos ay nagdaragdag ng isang ikalimang axis para sa mga kumplikadong gawain sa oryentasyon. Ang mga karagdagang axes ay nagdaragdag ng bilang ng servo at pagiging kumplikado ng controller, na nakakaapekto sa presyo.
Pagsasama ng sistema ng pangitain: Ang isang standalone na yunit ng robot na sinipi nang walang sistema ng paningin ay kumakatawan sa batayang presyo. Kapag naka-bundle sa integrated machine vision module ng Hengjiang - high-resolution industrial camera, LED ring illumination, real-time image processing unit, at calibration software - ang presyo ng system ay tumataas ngunit naghahatid ng isang turnkey solution na handa na para sa agarang pag-deploy.
Pag-mount ng pagsasaayos: Sinusuportahan ng serye ng HJ ang pag-install na naka-mount sa kisame (baligtad) bilang pamantayan, na nag-optimize ng espasyo sa sahig at nagpapabuti sa kakayahang ma-access para sa paglilinis. Ang mga pasadyang floor-stand frame o gantry mounts para sa mga espesyal na layout ay nagdadala ng karagdagang mga gastos sa engineering at katha.
Control system at lisensya ng software: Pinagsasama ng integrated drive-control cabinet ng Hengjiang ang mga servo amplifier, ang robot motion controller, mga relay ng kaligtasan, at ang HMI touchscreen sa isang enclosure. Sinusuportahan ng self-developed software platform ang remote na pagsubaybay, over-the-air firmware update, at pamamahala ng recipe para sa mga linya ng multi-produkto, lahat ay kasama sa standard package.
Pangunahing mga teknikal na pagtutukoy ng SCARA: Ang paulit-ulit na katumpakan ng pagpoposisyon ay ±0.025 mm sa lahat ng apat na axes, na napatunayan sa isang 100,000-cycle endurance test. Ang maximum na end-effector linear speed ay umaabot sa 2 m / s. Ang buong katawan ng robot ay tumitimbang ng humigit-kumulang na 40 kg, na nagpapasimple sa mga kinakailangan sa istruktura ng overhead. Ang lahat ng mga kasukasuan ay selyadong sa minimum na IP54, na may IP65 na magagamit para sa mga kapaligiran sa paghuhugas.
Para sa detalyadong pagpepresyo ng bawat modelo at pagsasaayos, makipag-ugnay sa koponan ng benta ng Hengjiang sa pamamagitan ngOnline na Pagtatanongpahina.
AngSCARA robot workstationmula sa Hengjiang ay isang pre-engineered automation cell na nagsasama ng isang food-grade SCARA robot, machine vision, infeed at outfeed conveyors, isang hindi kinakalawang na asero na frame, pagbantay sa kaligtasan, at isang pinag-isang control cabinet sa isang solong deployable unit. Ang pagsasama sa antas ng workstation na ito ay makabuluhang binabawasan ang oras ng engineering sa site kumpara sa pagbili ng mga indibidwal na bahagi at pagsasama ng mga ito nang nakapag-iisa.
Pangunahing arkitektura ng workstation: Ang layout ng cell ay nakaposisyon sa SCARA robot sa gitna sa itaas ng infeed conveyor. Ang isang istasyon ng pangitain sa itaas ng sobre ng robot ay kumukuha ng mga imahe ng bawat papasok na produkto. Ang mga naproseso na coordinate ay ipinapasa sa robot controller sa pamamagitan ng EtherCAT sa loob ng 20 ms latency, tinitiyak na ang robot ay tumatanggap ng tumpak na data ng pick bago maabot ng produkto ang pick zone. Ang mga outfeed conveyor sa isa o magkabilang panig ay nagdadala ng mga pinagsunod-sunod na produkto sa downstream packaging o tray-loading station.
Ang punong barko application na ipinakita sa Hengjiang ay ang Frozen Egg Tart Shell Sorting and Stacking Workstation. Sa pagsasaayos na ito, ang mga sariwang demolded na frozen na egg tart shell ay dumating sa infeed belt sa random na orientation. Tinutukoy ng vision system ang sentro ng posisyon at anggulo ng orientation ng bawat shell. Pinipili ng robot ng SCARA ang bawat shell at inilalagay ito sa isang itinalagang posisyon ng stack na may ±0.02 mm repeatability, na bumubuo ng mga unipormeng stack ng isang preset count na pagkatapos ay inilipat sa istasyon ng packaging. Ang cell ay nakakamit ang mga rate ng throughput na lumampas sa kung ano ang maaaring makabuo ng tatlo hanggang apat na manu-manong operator, na may zero na kontaminasyon mula sa pakikipag-ugnay sa tao.
Mga detalye ng kalinisan ng konstruksiyon: Ang frame ng workstation ay ganap na welded 304 hindi kinakalawang na asero na may electro-makintab na ibabaw. Ang mga conveyor belt ay gumagamit ng materyal na PU na grado ng pagkain. Ang lahat ng mga niyumatik na bahagi para sa end-effector gripper ay naka-mount sa loob ng selyadong robot arm housing, hindi nakalantad sa labas. Ang de-koryenteng gabinete ay naka-install sa labas ng zone ng pagkain upang maiwasan ang init at electromagnetic na panghihimasok mula sa nakakaapekto sa kalidad ng produkto.
Scalability: Ang isang solong SCARA workstation ay maaaring mapatakbo nang nakapag-iisa o naka-network sa isang mas malakingSCARA robot pag-aayos ng linya ng packagingKabilang dito ang awtomatikong paglo-load ng tray, pag-carton, at pag-iimpake ng kaso. Ang modular na arkitektura ng komunikasyon (OPC-UA compatible) ay nagbibigay-daan sa workstation na mag-ulat ng data ng produksyon - cycle count, reject rate, gripper force telemetry - sa isang sentral na MES o ERP system.
Ang workstation na ito ay din ang landas ng pagsasama ng entry-level para sa mga tagagawa na nais na i-automate ang isang hakbang sa proseso bago mangako sa isang full-line na solusyon. Tingnan angSerbisyo at Suportaseksyon para sa pag-install, pagsubok sa pagtanggap, at mga detalye ng pagsasanay ng operator.
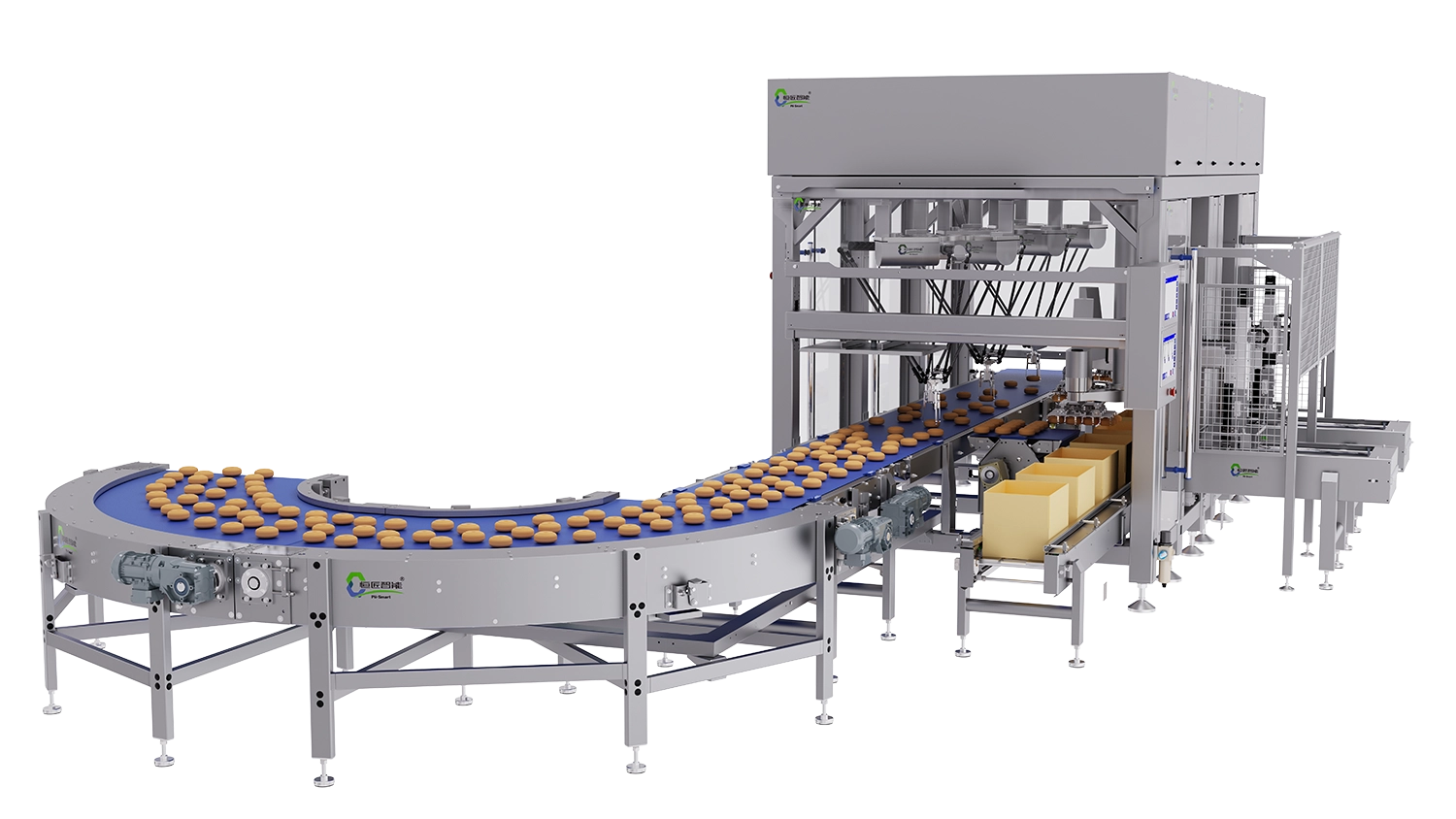
AngDelta Robot Workstationmula sa Hengjiang ay nag-configure ng isa o higit pang mga HJ-D11003-1 delta robot sa itaas ng isang ibinahaging conveyor belt, na may isang pinag-isang sistema ng pangitain na namamahala sa mga pick assignment sa lahat ng mga robot sa kumpol. Ang arkitektura ng multi-robot na ito ay ang diskarte sa pamantayan ng industriya para sa pagkamit ng napakataas na throughput sa mabilis na paglipat ng mga linya ng infeed kung saan ang isang solong robot ay magiging bottleneck.
Single-unit delta workstation: Ang isang solong HJ-D11003-1 na naka-mount sa itaas ng isang 500-800 mm na lapad na sinturon ay humahawak ng mga produkto na dumarating sa mga rate na hanggang sa humigit-kumulang na 60-80 picks bawat minuto depende sa geometry ng produkto at oras ng pag-ikot ng gwerper. Ang sistema ng paningin ay nag-iilaw sa sinturon gamit ang isang nakabalangkas na LED array, kinukuha ang mga imahe sa isang naka-program na rate ng pag-trigger, at naglalabas ng posisyon ng XY at data ng anggulo para sa bawat natukoy na produkto. Ang robot controller ay nagpapanatili ng isang pila ng mga nakabinbing pick, na isinasagawa ang mga ito sa pagkakasunud-sunod na nagpapaliit ng distansya sa paglalakbay ng braso (pag-iiskedyul ng pinakamalapit na kapitbahay), na nagpapalaki ng epektibong throughput.
Multi-unit delta cluster: Kapag ang bilis ng linya o density ng produkto ay lumampas sa kapasidad ng solong robot, dalawa, tatlo, o higit pang mga robot ng delta ang nakaayos sa serye sa kahabaan ng direksyon ng conveyor. Ang ibinahaging vision host ay nagtatalaga ng bawat papasok na produkto sa isang tukoy na robot batay sa posisyon zone at pagkakaroon ng robot (load balancing). Kung ang isang robot ay abala sa pagkumpleto ng isang nakaraang pick, ang takdang-aralin ay pasulong sa susunod na magagamit na yunit. Tinitiyak ng pag-iiskedyul ng kooperatiba na ito na walang produkto na lumalabas sa pick zone nang hindi hinahawakan sa ilalim ng normal na kondisyon ng pagpapatakbo.
Donut sorting application: Sa Donut Robot Sorting Workstation application, ang Hengjiang ay nagde-deploy ng isang multi-robot delta cluster upang pag-uri-uriin ang mga sariwang pinirito o frozen na donut ayon sa laki, hugis, at spacing sa mga tray o packaging molds. Ang module ng pagtuklas ng depekto ng vision system ay sabay-sabay na sumusuri para sa mga sirang o malformed na donut, na inililipat ang mga pagtanggi sa isang hiwalay na lane. Ang buong cell ay direktang nakikipag-ugnayan sa HengjiangDonut Bumubuo ng Linya ng Produksyonupstream, paglikha ng isang patuloy na awtomatikong daloy mula sa paghubog ng kuwarta sa pamamagitan ng pag-aayos at packaging.
Mga pagpipilian sa end-effector tooling: Nagbibigay ang Hengjiang ng mga pagmamay-ari na gripper na tumutugma sa mga karaniwang produkto ng panaderya - vacuum suction cup sa food-grade silicone para sa mga produktong makinis na ibabaw, adaptive mechanical fingers para sa hindi regular na hugis, at mga tool sa needle-array para sa pinong layered pastry. Pinapayagan ng mga end-effector na mabilis na pagbabago ng mga operator na lumipat ng mga uri ng produkto sa ilalim ng dalawang minuto nang walang mga tool.
Kaligtasan at pagsunod: Ang bawat workstation ay may kasamang mga light curtain sa lahat ng mga access point ng operator, mga emergency stop circuit, at mga module ng relay na na-rate ng kaligtasan na sumusunod sa ISO 13849 PLd. Ipinatutupad ng control software ang mga limitasyon sa bilis at puwersa kapag ang safety light curtain ay bahagyang naka-block (pinababang bilis ng mode) sa halip na magsagawa ng isang hard stop, na nagpapaliit ng pagkagambala sa produksyon sa panahon ng maikling pagpasok ng operator.
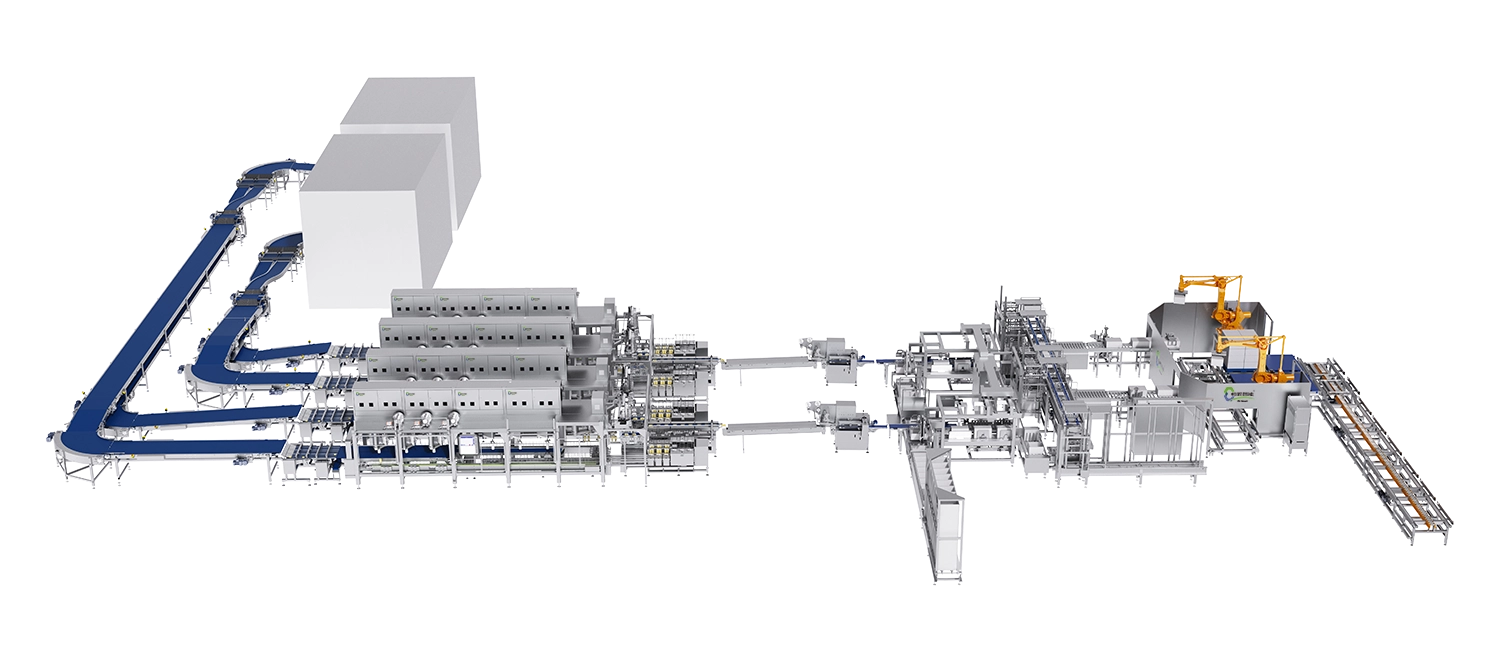
AngSCARA robot pag-aayos ng linya ng packagingmula sa Hengjiang ay isang kumpletong sistema ng produksyon na tumatagal ng mga hindi pinagsunod-sunod na mga produkto ng pagkain sa inlet at naghahatid ng napuno, selyadong mga karton o tray sa outlet - nang walang manu-manong interbensyon sa pagitan ng dalawang puntong ito. Ang solusyon sa antas ng linya na ito ay kumakatawan sa pinakamataas na antas ng pagsasama sa robotic portfolio ng Hengjiang at idinisenyo para sa mga tagagawa na nagpapatakbo ng mga SKU na may malalaking dami ng mga SKU na may mahigpit na mga kinakailangan sa pagkakapare-pareho ng output.
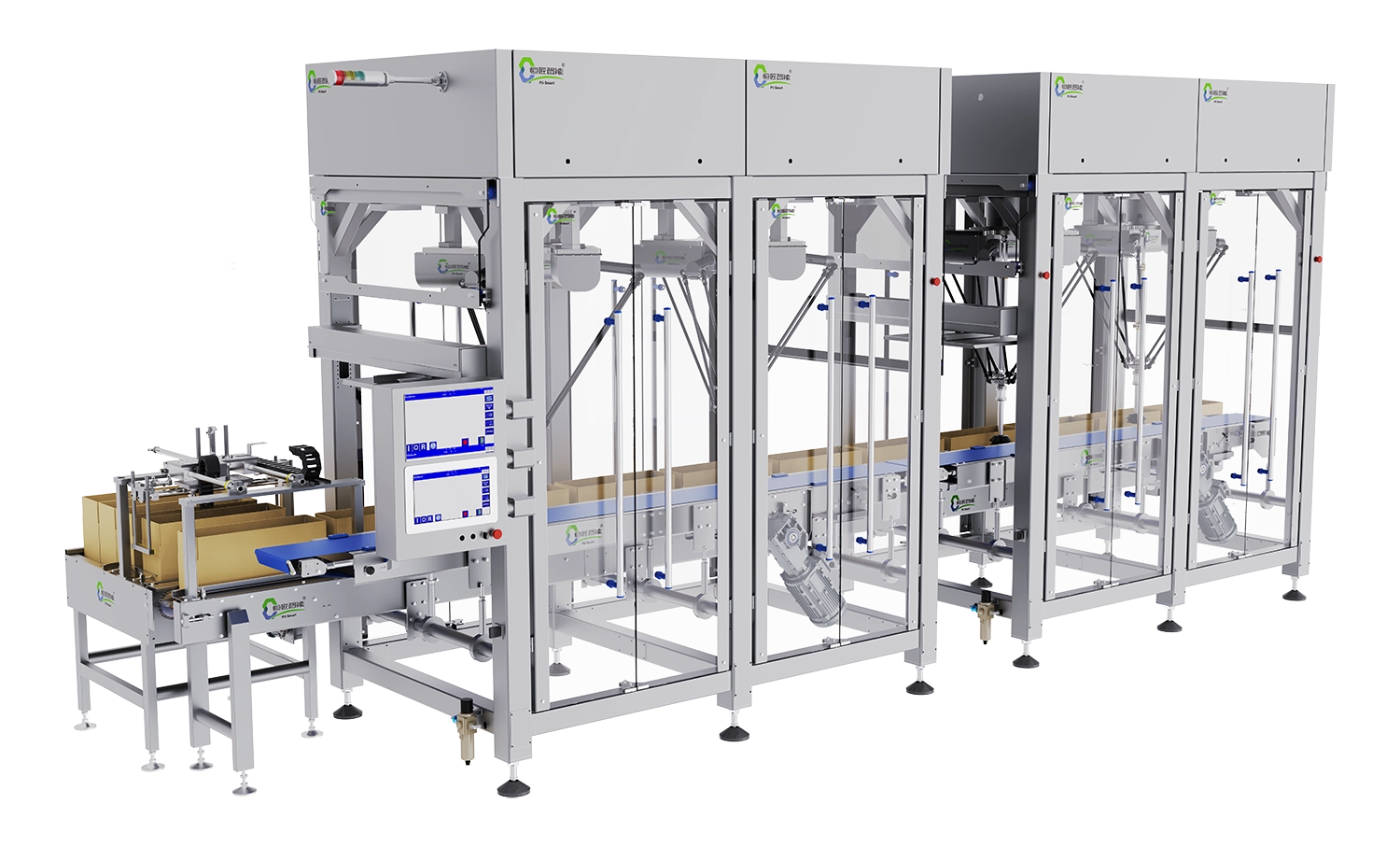
Arkitektura ng system: Ang linya ay binubuo ng anim na functional zone na nakaayos sa linear o hugis-L na mga layout upang umangkop sa magagamit na espasyo sa sahig ng pabrika. Ang Zone 1 ay ang buffer ng infeed, kung saan ang mga produkto mula sa isang upstream baking o proseso ng pagyeyelo ay natatanggap sa isang kumakalat na conveyor na nagpapakalat sa kanila sa isang solong layer para sa inspeksyon ng paningin. Ang Zone 2 ay ang istasyon ng inspeksyon ng paningin, na nagsasagawa ng 100% na inspeksyon ng produkto para sa sukat, hugis, pagkakapareho ng kulay, at mga depekto sa ibabaw. Ang Zone 3 ay ang SCARA robot picking zone, kung saan ang isa o dalawang SCARA robot ay nagsasagawa ng coordinated pick-and-place ng mga tinatanggap na produkto sa mga tray o packaging mold na nakaposisyon sa isang parallel indexing conveyor. Hinahawakan ng Zone 4 ang pag-verify ng pagpuno ng tray sa pamamagitan ng isang timbang-check scale na isinama sa outfeed ng robot zone. Ang Zone 5 ay ang awtomatikong tray lidding o cartoning module, na nag-aaplay ng mga takip ng pelikula o papel at tinatakan ang mga gilid ng tray. Ang Zone 6 ay ang case packing at palletizing module, na pangkat ng mga selyadong tray sa mga kaso ng pagpapadala at isinalansan ang mga ito sa mga pallet.
Application: Frozen Egg Tart Shell Sorting at Packaging Production Line. Ang mga demolded frozen egg tart shell ay pumasok sa linya sa Zone 1 sa mga rate na hanggang sa 200 piraso bawat minuto. Ang sistema ng pangitain sa Zone 2 ay tumutukoy at tinatanggihan ang mga sirang o deformed shell (karaniwang mas mababa sa 2% ng output sa isang mahusay na pinapanatili na linya ng pagbuo). Ang mga robot ng SCARA sa Zone 3 ay naglalagay ng mga tinanggap na shell sa 6-cavity o 12-cavity plastic trays na na-index sa parallel conveyor na may katumpakan ng pagpoposisyon ng tray na ±0.5 mm. Ang nakumpletong linya ay naghahatid ng selyadong, may label na mga tray na handa na para sa pamamahagi ng cold-chain. Tingnan ang Itaas ng IlogHong Kong-style egg tart na bumubuo ng linya ng produksyonPara sa konteksto sa kung paano nabuo shell ay ginawa bago pumasok sa pag-aayos at packaging system na ito.
Pagsasama ng kontrol: Ang buong linya ay tumatakbo sa isang solong superbisor na PLC na may 21-pulgada na touchscreen HMI. Ang sub-controller ng bawat zone ay nakikipag-usap sa superbisor na PLC sa pamamagitan ng PROFINET. Maaaring subaybayan ng mga operator ang throughput ng zone-by-zone, kasaysayan ng alarma, mga rate ng pagtanggi at mga sukatan ng OEE (Pangkalahatang Pagiging Epektibo ng Kagamitan) sa real time. Sinusuportahan ng system ang pag-iimbak ng recipe para sa maramihang mga SKU ng produkto; Ang pagbabago sa pagitan ng mga SKU ay nangangailangan lamang ng isang pagpili ng recipe sa HMI kasama ang isang pisikal na end-effector at pagbabago ng format ng tray, na makakamit sa ilalim ng 15 minuto.
Footprint at mga utility: Ang isang buong linya para sa mga shell ng itlog ay sumasakop sa humigit-kumulang na 15-20 m ang haba at 3-4 m ang lapad. Ang kinakailangan ng kuryente ay 380V tatlong-phase, 50 Hz, karaniwang 15-25 kW kabuuang konektadong load. Ang naka-compress na hangin sa 0.6 MPa ay kinakailangan para sa gripper actuation at pneumatic tray clamping. Ang mga koneksyon sa tubig para sa CIP (Clean-In-Place) ay opsyonal depende sa pag-uuri ng hygienic zone ng pasilidad.
Ang awtomatikong linya ng pag-aayos ng donut sa Hengjiang ay pinagsasama ang SCARA at delta robot sa isang coordinated configuration na partikular na na-optimize para sa mga pisikal na katangian ng mga donut - bilog o hugis-itlog na hugis, malambot na deformable texture, iba't ibang mga ibabaw ng glazing, at mataas na bilis ng linya mula sa mga fryer o proofer na may mataas na kapasidad. Ang linya na ito ay nakasulat sapinagsamang paggamit ng SCARA at Delta Robotsseksyon ng pinagsamang portfolio ng workstation ng Hengjiang.
Bakit ang mga donut ay nangangailangan ng isang dalubhasang linya: Ang mga donut ay nagtatanghal ng natatanging mga hamon sa paghawak. Ang kanilang malambot, malagkit na ibabaw ay ginagawang kritikal ang pagpili ng vacuum cup - masyadong maraming pagsipsip na nagpapasama sa produkto; Masyadong kaunti ang nagiging sanhi ng pagbagsak. Ang kanilang pabilog na geometry ay nangangahulugang ang orientation control ay hindi gaanong kritikal kaysa sa mga produktong itinuro ngunit ang pare-pareho na spacing sa packaging tray ay mahalaga para sa pagtatanghal. Ang mga linya ng donut na may mataas na dami (mga pang-industriya na fryer na gumagawa ng 3,000-6,000 piraso bawat oras) ay nangangailangan ng mga kumpol ng robot na may kakayahang napapanatiling throughput nang walang pagkapagod na nauugnay sa pagkasira ng pagganap sa mga operasyon ng multi-shift.
Pagsasaayos ng linya para sa mga donut: Ang mga robot ng Delta ay humahawak ng pangunahing high-speed pick-and-place na gawain mula sa fryer outfeed conveyor sa mga intermediate tray. Ang kanilang mga rate ng pag-ikot ng 60-100 picks bawat minuto bawat yunit, na pinagsama sa isang tatlo o apat na robot cluster, ay tumutugma sa mga rate ng output ng pang-industriya na fryer. Pagkatapos ay hawakan ng mga robot ng SCARA ang pangalawang gawain: pagpili ng mga pre-sorted na donut mula sa mga intermediate tray at paglalagay ng mga ito sa retail packaging na may tumpak na oryentasyon, pag-verify ng bilang, at pag-stack ng layer. Ang dibisyon ng paggawa na ito ay gumaganap sa lakas ng bawat uri ng robot - delta para sa hilaw na bilis, SCARA para sa paglalagay ng katumpakan at mas mabigat na kargamento.
Pagiging tugma ng glazing: Ang end-effector tooling sa linya ng donut ay ininhinyero para sa glazed, pinahiran ng asukal, at plain na ibabaw. Ang mga tasa ng pagsipsip ng silicone na may adjustable vacuum regulators ay nagbabayad para sa pagkakaiba-iba ng ibabaw. Ang algorithm ng reflectance-normalization ng vision system ay humahawak ng pagkakaiba-iba ng kaibahan sa pagitan ng matte at makintab na glazings nang hindi nangangailangan ng hiwalay na pagkakalibrate sa bawat variant ng produkto.
Pagsasama sa bumubuo ng linya: Ang linya ng packaging na ito ay direktang nakikipag-ugnayan sa Hengjiang'sDonut Bumubuo ng Linya ng Produksyon, paglikha ng isang patuloy na produksyon-sa-packaging chain. Nag-aalok ang Hengjiang ng paghahatid ng proyekto ng turnkey na sumasaklaw sa parehong linya ng pagbuo at linya ng pag-aayos at pag-iimpake sa ilalim ng isang solong kontrata, na may pinag-isang komisyon at pagsasanay sa operator.
AngAwtomatikong linya ng pag-aayos ng pizzasa Hengjiang ay gumagamit ng dual-unit o multi-unit delta robot deployments upang mahawakan ang pag-aayos at pag-iimpake ng frozen na pizza, na tumutugon sa mga tiyak na hamon ng flat, malaki-diameter na mga produktong pagkain na dapat ilagay sa mga karton na may katumpakan sa antas ng millimeter.
Mga hamon sa paghawak ng tukoy sa pizza: Ang mga frozen pizza ay malaki (200-350 mm diameter karaniwan), medyo mabigat kumpara sa mga donut o pastry (200-500 g bawat yunit), at dapat ilagay sa malapit na tolerance na manggas ng karton nang walang pinsala sa gilid sa topping layer o crust. Ang panloob na sukat ng packaging carton ay nag-iiwan lamang ng 3-5 mm clearance sa bawat panig, nangangahulugang ang katumpakan ng paglalagay ng robot at paulit-ulit ay dapat na mas mahigpit kaysa sa clearance tolerance. Ang HJ-D11003-1 ng Hengjiang na may umiikot na axis ay nakakamit ang ±0.5 mm na pag-uulit ng paglalagay sa eroplano ng XY sa buong bilis ng pagpapatakbo - na rin sa loob ng kinakailangang pagpapaubaya para sa karaniwang mga format ng karton ng pizza.
Mga pagsasaayos ng dual-unit at multi-unit delta: Ang mga linya ng pizza na dokumentado sa portfolio ng Hengjiang ay kinabibilangan ng Pizza Sorting at Packaging Line A at Pizza Sorting at Packaging Line B, na kumakatawan sa iba't ibang mga tier ng throughput at mga pagsasaayos ng layout. Ang Line A ay gumagamit ng isang dalawang-robot na kumpol ng delta para sa mga linya ng katamtamang kapasidad (800-1,500 pizza bawat oras). Ang Line B ay gumagamit ng tatlo o apat na robot cluster para sa mga linya na may mataas na kapasidad na tumutugma sa output ng mga pang-industriya na deck oven o tunnel baking system. Ang parehong mga linya ay gumagamit ng parehong arkitektura ng pangitain at kontrol, na naiiba lamang sa bilang ng robot at lapad ng conveyor.
Pagtatayo at pagbubuklod ng karton: Ang linya ng packaging ay nagsasama ng isang awtomatikong tagapagtayo ng karton sa inlet ng packaging zone, isang module ng paglo-load ng robot kung saan inilalagay ng mga robot ng delta ang mga pizza sa mga itinayo na karton, at isang hot-melt glue sealing station sa outlet. Ang isang print-and-apply labeling system ay nag-aaplay ng variable na impormasyon (batch code, best-before date, weight) kaagad pagkatapos ng pagbubuklod. Ang buong pagkakasunud-sunod mula sa pizza pick hanggang sa may label na selyadong karton ay nakumpleto sa ilalim ng 8 segundo bawat yunit sa linya na may mataas na kapasidad.
Mga pagsasaalang-alang sa malamig na zone: Ang mga frozen na linya ng pizza ay gumagana sa mga zone ng produksyon na may mababang temperatura (karaniwang 0 ° C hanggang 10 ° C na kapaligiran). Ang mga robot ng delta ng Hengjiang ay tinukoy na may mababang temperatura na grasa para sa lahat ng mga ibabaw ng tindig at selyadong mga winding ng motor na na-rate para sa napapanatiling operasyon sa mga kapaligiran ng malamig na silid. Ang pamamahala ng kondensasyon sa electrical cabinet ay gumagamit ng thermostatically controlled heaters upang maiwasan ang akumulasyon ng kahalumigmigan sa panahon ng mga paglipat ng temperatura.
Upstream integration: Ang linya ng pag-aayos at pag-iimpake ng pizza ay direktang kumokonekta sa Hengjiang'slinya ng produksyon na bumubuo ng pizzaat ang kaugnay na output ng baking tunnel. Pinapayagan nito ang isang kumpletong proyekto sa automation ng pabrika ng pizza na makuha mula sa isang solong tagapagtustos, na pinapasimple ang pamamahala ng proyekto, responsibilidad sa warranty, at pangmatagalang koordinasyon ng serbisyo.
Para sa mga video na demonstrasyon ng parehong mga pagsasaayos ng linya ng pizza na nagpapatakbo, bisitahin angSeksyon ng Video ng Pagluluto ng Robot.
Ang Hengjiang Intelligent Technology Co., Ltd. ay isang patayo na pinagsamang tagagawa: mekanikal na disenyo, pag-unlad ng servo drive, software ng kontrol ng paggalaw ng robot, mga algorithm ng paningin ng makina, at pagsasama ng system ay isinasagawa sa bahay. Nangangahulugan ito na walang mga panganib sa pagiging tugma ng inter-supplier sa mga kritikal na interface sa pagitan ng robot, pangitain, at kontrol - isang karaniwang punto ng pagkabigo sa mga third-party na integrated system.
Ang lahat ng kagamitan ay sumasailalim sa isang mahigpit na pagsubok sa pagtanggap ng pabrika (FAT) sa pasilidad ng Hengjiang bago ang pagpapadala, na ginagaya ang mga kondisyon ng produksyon ng customer na may mga kinatawan na produkto. Ang pag-install at pagkomisyon ay isinasagawa ng sariling teknikal na koponan ng Hengjiang. Kasama sa suporta sa post-commissioning ang remote na pagsubaybay sa pamamagitan ng platform ng kontrol na pinagana ng IoT, na may real-time na pag-access sa mga log ng fault, data ng pag-ikot, at mga sukatan ng pagganap. Para sa isang buong paglalarawan ng balangkas ng serbisyo - kabilang ang mga protocol ng inspeksyon ng kagamitan, mga pamantayan sa pag-install, at mga tuntunin ng warranty - sumangguni saSerbisyo at Suportapahina.
Nag-aalok din ang Hengjiang ng kumpletong mga linya ng produksyon ng pagluluto na sumasaklaw sa mga kategorya ng pastry, croissant, egg tart, donut, pizza, at pie. Kapag ang isang robotic na pag-aayos at linya ng packaging ay ipinares sa isang linya ng pagbuo at pagluluto ng Hengjiang, ang resulta ay isang ganap na awtomatikong smart factory cell na may isang solong punto ng teknikal na pananagutan. Galugarin ang buongPortfolio ng Linya ng ProduksyonPara sa mga pagpipilian sa kagamitan sa itaas, o bisitahin angPahina ng kumpanya ng Hexeon Grouppara sa background ng kumpanya, kapasidad sa pagmamanupaktura, at impormasyon sa kultura.
Para sa mga katanungan na tukoy sa produkto, mga talakayan sa pagpepresyo, o mga kaayusan sa pagbisita sa pabrika, gamitin angPahina ng Pakikipag-ugnayUpang maabot nang direkta ang teknikal na koponan sa pagbebenta ng Hengjiang.